























|
상세 정보 |
|||
| 권취 속도: | 맥스. 100m/min | 권취 장력: | 30N~300N |
|---|---|---|---|
| 릴 직경: | 800-1600mm | 광케이블 지름: | 6-18mm |
| 전력 크기: | 2KVA,380V 50Hz AC 3phase+N wire+ground는 전보를 칩니다 | 서비스: | 12 달 보증 |
| 강조하다: | 300N 자동 횡단은 기계를 차지합니다,2KVA 횡단은 기계를 차지합니다 |
||
제품 설명
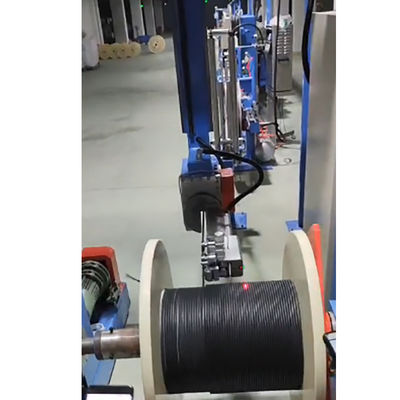
로보틱 아암 자동 횡단은 야외 광섬유 케이블을 위한 기계를 차지합니다
나는 광섬유 케이블 기계 20220228.pdf를 -선탑
1.장치적용
이 기계는 주로 횡단해서 사용되고 대신 설명서 테이크-업 케이블에서 보안 위험을 감소시켜 모든 케이블, 최적 안전을 차지합니다. 그리고 그것은 획일적 와인딩 품질과 어떤 케이블 교차를 보증하지 않습니다.
2.기술적인 매개 변수
| 권취 속도 | 맥스. 100m/min |
| 권취 장력 | 30N~300N |
| 릴 직경 | 0.8M~1.6M |
| 배럴 | 민. 400 밀리미터 |
| 제품 직경 | 6-18mm (조정될 수 있습니다) |
| 힘 |
1.5KW |
3.주요 상술과 성능
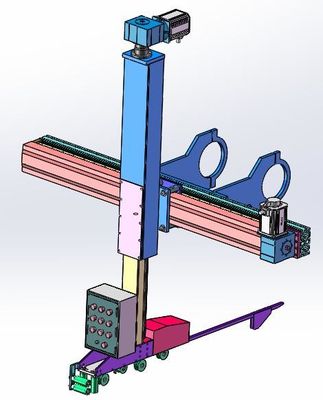
A.Robot 팔 트레버스 장치
구조는 받침대 전선이 비어 있는 설치 공간을 저장하기 위해 업 프레임을 잡는다는 것을 접지 레일에 통합되는 중단된 조종자입니다. 변환의 상대적 성명은 x 축과 Y 축으로 분할됩니다. x 축은 수평선상 횡단 방향이고 Y 축이 수직 상승 방향입니다.어떤 인간의 개입도 횡단의 과정에서 요구되지 않습니다 ;
가로지르는 방식 : 파나소닉 서보 모터 +HIWIN 선형 가이드 레일 +TBI 볼 스크류 횡단 ;그것은 전통적 갠트리 타입 보다 더 안정적이고, 더 적은 오류를 가지고 있습니다.더 그것은 규칙적이다.로봇 팔의 자동적 리프팅은 센서에 의해 탐지되어서, 로봇 팔과 전선 보빈 사이의 디 앵글이 항상 일관되고 횡단이 깔끔합니다.Y-축 구조 리프팅은 파나소닉 서보 모터 +HIWIN 리니어 슬라이드 선로 +YYC 가이드 레일 특별한 헬리컬 래크 기어로 구성됩니다.소형 구조, 원활한 운영
● 트래버스 모터 1KW 파나소닉 서보 모터
● 리피팅은 1KW 파나소닉 서보 모터를 자동차로 나릅니다
● HIWIN 대만 HIWIN
● 횡단 볼 스크류 대만 TBI
● 승강 랙 대만 YYC
● X-축 수평 트래버스는 1300 밀리미터를 여행합니다
● 상승한 Y 축 수직은 1050 밀리미터를 여행합니다
![]()